
Сервоприводы в клининге
Все мы, так или иначе, слышали о сервоприводах (следящий привод), но что характеризует приставка «серво» часто остается в толще мутной воды.
Большинство источников сходятся в том, что центробежный регулятор, используемый для управления частотой вращения в паровых двигателях, изобрел Джеймс Ватт, это и было первое применение механизма сервопривода на паровых машинах.

Примечание: «Центробежный регулятор был известен задолго до Уатта и широко применялся на ветряных мельницах для автоматической регулировки скорости врещения крыльев мельницы. Дата изобретения и автор мельничного регулятора неизвестены. В 1787 г. Уатт адаптировал существующий центробежный регулятор под паровую машину, создав более совершенную конструкцию, названную для отличия от прототипа — регулятором Уатта.»
В этом красивом и простом механизме используется центробежная сила, чтобы поднять или опустить набор шаров, которые прикреплены к валу. По мере того как частота вращения вала увеличивается, шары будут подниматься всё выше и выше, так как модуль центробежной силы растет, а муфта будет опускаться ниже, потому что она соединена при помощи тяг с рычагами грузов, и это дает муфте доступ к силе. Когда она опустится слишком низко, коромысло потянет тягу дросельной заслонки, закрываяя её. Это уменьшит подачу пара и мощность двигателя, таким образом частота вращения вала не будет привышать допустимого значения.

В промышленом клининге, сервоприводы часто используются для контроля температуры и управления движением. Так что же такое «серво?» Основное отличие сервопривода, которое отделяет его от других схем управления в том, что он является интерактивным.
Рассмотрим следующие иллюстрации. В обоих случаях задача состоит в том, чтобы переместить элемент (в данном случае коробка, например) из положения «A» в положение «B». Это может быть выполнено с помощью конвейерной ленты с функцией определения положения. В обычной системе управления, используются конечные или путевые выключатели. Фланец крепится к транспортиру и активирует конечные выключатели, которые при прохождении определенного растояния включают или отключают двигатель, в случае если частота вращения привода постоянная.
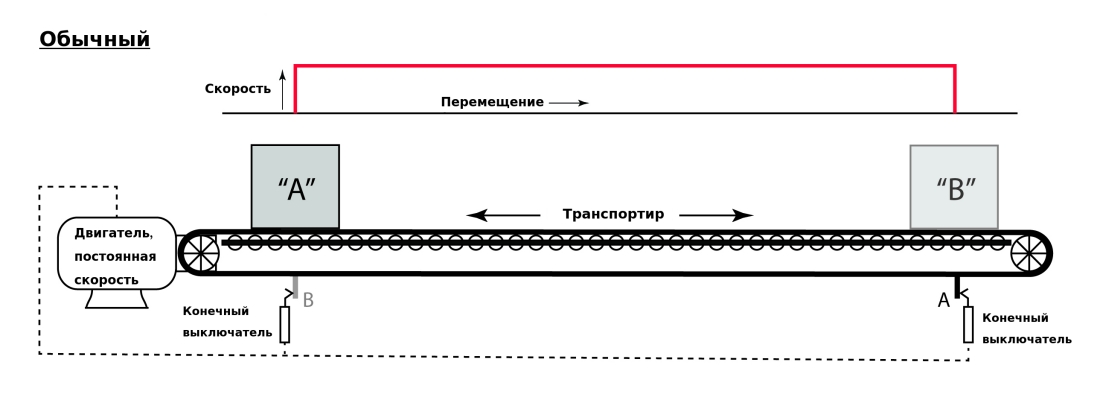
Однако, скорость двигателя может быть переменной, а скорость ленты должна быть неизменной во время передачи коробки из положения «A» в положение «B», за исключением моментов запуска и остановки.
В обычной, более традиционной системе управления применяются следующие соображения:
- Вращение вала двигателя должно быть ограничено по скорости, чтобы не происходило повреждений или проскальзывания объектов на конвейерной ленте.
- Скорость должна быть ограничена, чтобы предотвратить «выброс», когда желаемое положение будет достигнуто.
- Условия совершенно неизвестны между начальной и конечной точкой.
Теперь рассмотрим систему на сервоприводах.
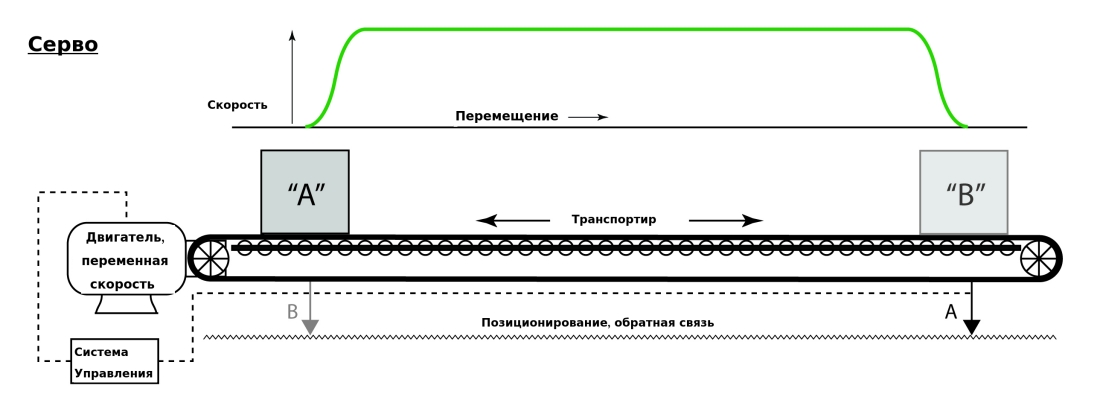
Следящий (серво) привод включает в себя устройство обратной связи, которое передает данные о расположении конвейера в каждый момент времени. Это устройство обратной связи может быть в форме потенциометра, оптического датчика или любого другого подходящего устройства.
Потенциометр выглядит так:

Информация из этого показателя принимается посредством системы управления. Система управления интерпретирует обратную связь и посылает соответствующие корректировочные сигналы. Система управления может реагировать по разному. Например, если датчики указывают на то, что груз находится на некотором расстоянии от цели, то она может увеличить скорость перемещения, а затем произойдет торможение. В результате, время, необходимое для перехода из «А» в «B», в нашем примере, может быть значительно уменьшено, как показано на иллюстрациях.
Серво системы также могут помочь с контролем температуры, активируя подогрев или охлаждение.
Серво управление, хоть, и дороже, чем более традиционные элементы управления, но они в состоянии обеспечить точное управление посредством программирования и полной автоматизации.
Услуги
Статьи клининг
Что такое чистая комната?
Чистые комнаты являются неотъемлемой и необходимой частью многих производственных операций. Цель чистой комнаты — обеспечить среду без каких-либо загрязнителей в воздухе, будь то обычная […]

Уборка на производстве
Многим из тех, кто бывал на территории промышленных предриятий, известно о важности своевременной уборки. Что-то может выполнять штатная санбригада и компания стандартного клининга. Ведь, не […]

Что следует знать о ржавчине.
Все мы с вами знаем что такое ржавчина и каковы причины её появления. Причем такая «известность» не мешает ржавчине обладать уникальными свойствами, знание которых, достаточно необходимо […]
Теплота — Определения и понятия
Температура — это очень важная переменная в клининге — возможно, самая важная. Потому, может стоит уделить какое-то время, чтобы разобрать понятие теплоты — особенно интересно, […]
Вытяжка и нейтрализация газов, полученных в процессе очистки
Во многих процессах промышленного клининга возникает необходимость избавится от сторонних газов, которые неизбежно воделяются во время очистки. Причин для удаления таких газов масса: Отвод тепла, […]